Del in cylindrical and spherical coordinates
This is a list of some vector calculus formulae of general use in working with various curvilinear coordinate systems.
Contents |
Note
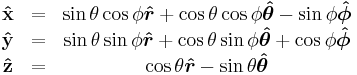
- This page uses standard physics notation. For spherical coordinates,
 is the angle between the z axis and the radius vector connecting the origin to the point in question.
is the angle between the z axis and the radius vector connecting the origin to the point in question.  is the angle between the projection of the radius vector onto the x-y plane and the x axis. Some sources reverse the definitions of and , so the meaning should be inferred from the context.
is the angle between the projection of the radius vector onto the x-y plane and the x axis. Some sources reverse the definitions of and , so the meaning should be inferred from the context. - The function atan2(y, x) can be used instead of the mathematical function arctan(y/x) due to its domain and image. The classical arctan(y/x) has an image of (-π/2, +π/2), whereas atan2(y, x) is defined to have an image of (-π, π]. (The expressions for the Del in spherical coordinates may need to be corrected)
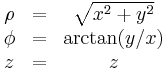
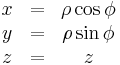
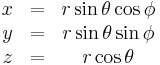
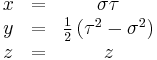
| Operation | Cartesian coordinates (x,y,z) | Cylindrical coordinates (ρ,φ,z) | Spherical coordinates (r,θ,φ) | Parabolic cylindrical coordinates (σ,τ,z) |
|---|---|---|---|---|
| Definition of coordinates |
 |
 |
 |
 |
 |
 |
 |
 |
|
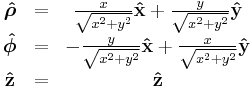
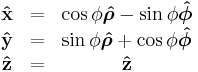
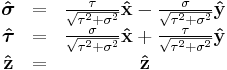
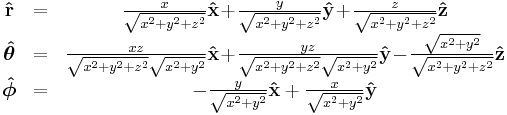
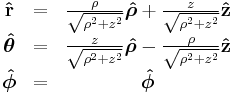
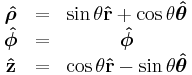
| Definition of unit vectors |
 |
 |
 |
 |
 |
 |
 |
 |
|
A vector field  |
 |
 |
 |
 |
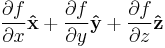
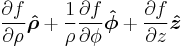
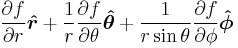
Gradient  |
 |
 |
 |
 |
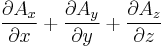
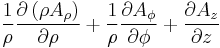
Divergence  |
 |
 |
 |
 |
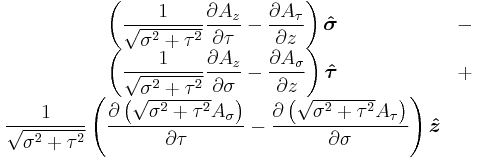
Curl  |
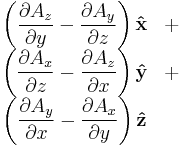 |
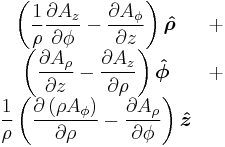 |
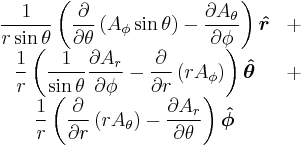 |
 |
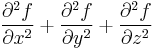
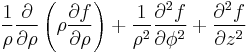
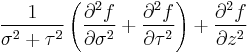
Laplace operator  |
 |
 |
 |
 |
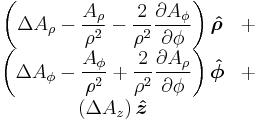
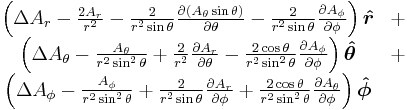
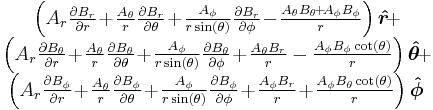
Vector Laplacian  |
 |
 |
 |
|
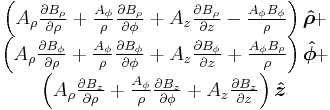
| Material derivative | 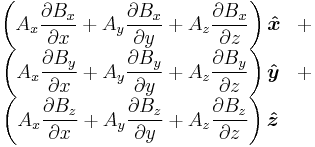
|
|
 |
|
| Differential displacement |  |
 |
 |
 |
| Differential normal area | 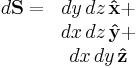 |
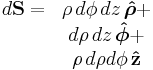 |
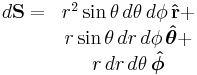 |
 |
| Differential volume |  |
 |
 |
 |
Non-trivial calculation rules:
|
||||

 (
(

 (using Lagrange's formula for the
(using Lagrange's formula for the 
References
- ^ Weisstein, Eric W.. "Convective Operator". Mathworld. http://mathworld.wolfram.com/ConvectiveOperator.html. Retrieved 23 March 2011.
See also
- Del
- Orthogonal coordinates
- Curvilinear coordinates
- Vector fields in cylindrical and spherical coordinates
External links
- Maxima Computer Algebra system scripts to generate some of these operators in cylindrical and spherical coordinates.